工業自動化


整合運動控制 ‧ 安全 ‧ 視覺 ‧ 機器人 ‧ 感測 的現場資訊,直接連上工廠資料庫,進行大數據分析。 |
|---|



NX102系列內建
OPC UA通訊功能

NX1

小型 IoT 入門款
NX1P
內建運動控制
輸入輸出

NJ501-1□00系列內建國際標準
( IEC 62541 ) OPC UA通訊功能
NJ5
最大64軸
適用於大規模系統

雙同步運動控制核心
NX7
最大256軸
適用於大規模系統
| 用單一的控制器整合邏輯演算與動作控制 |
|---|
|
機械自動控制器 NJ/NX/NY系列
兼具超高速效能與可靠性
|

|
|---|
符合國際標準規格的程式化環境
可連接的資料庫
|

|
|---|
| 整合動作、安全元件、視覺、感測器的開發環境 |
|---|
|
自動化整合軟體 Sysmac Studio SYSMAC-SE2□□ Sysmac Studio 是一種可支援結構(配置設定)、程式製作、監控功能以及 3D 動作模擬的整合性開發環境(IDE)。利用可直覺操作的使用者介面,可縮短連接器的設置時間。 |

|
|---|
|
Sysmac Library SYSMAC-XR□□ Sysmac Library是一款適合 NJ / NX 系列機械自動控制器程式的軟體功能元件組。OMRON 將既有豐富的控制程式專業知識功能區塊(FB)化,讓您輕鬆即可建立高階的控制應用程式。 |

|
|---|
|
只要將Sysmac Library 各式高功能FB資料庫安裝在 Sysmac Studio 自動化軟體中,即可作為程式使用。 |

|
|---|
用單一的控制器整合邏輯演算與動作控制

|
|---|
機械控制與資訊通訊
|
|---|
SEtherCAT - 機械控制網路
|
Ethernet - 資料通訊網路
|
|---|
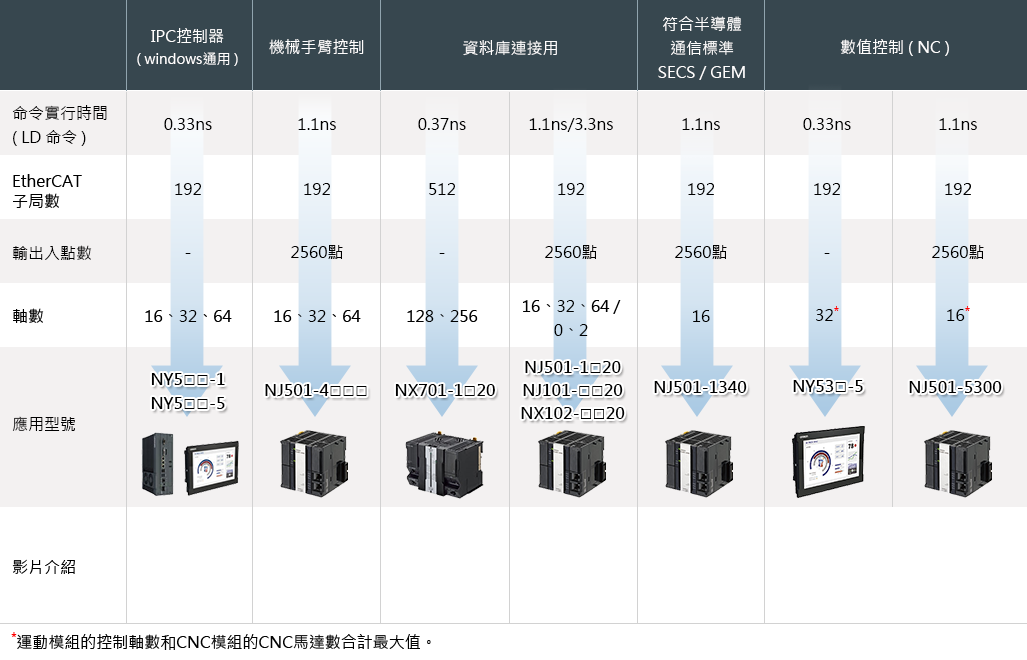
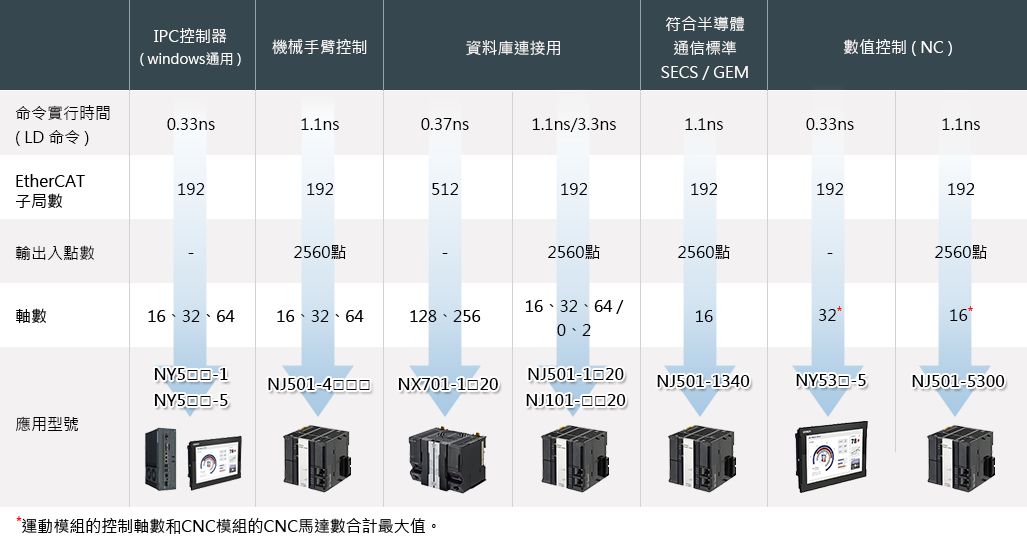
| IPC 控制器 |
|---|
| 實現控制進化與資訊革新融合的新一代工業電腦 |
| NY5□□-1/NY5□□-5 觀看影片介紹 |

|
壓倒性的高速機器控制 伺服馬達的同步控制、電子凸輪控制,高速、高精度的運動控制,都能在功能區塊中輕鬆實現。 可執行Windows的應用程序 搭載intel®®Corer™i7-4700 EQ Processer第四代CPU安裝。您可延續使用過去的PC軟體。 配備 EtherCAT 連接埠 歐姆龍豐富的控制器陣容,可以構建多達192個子局控制器、64軸運動控制、甚至於安全控制。且支援符合IEC61131-3(和JIS B 3503)的全球標準語言。 |
|---|
| 機械手臂控制型 |
|---|
| 融合一般的機器控制與機械手臂控制,為客戶的彈性創造案賦予新價值 |
| NJ501-4□□□ 觀看影片介紹 |

|
|---|
|
NJ Robotics 系統建構
|
| SECS/GEM通信型 |
|---|
| NJ501-1340 觀看影片介紹 |
|
|