
(請點選圖片檢視大圖)
更新日期 2026年2月9日
集高功能運動控制和現場IoT網路於一身的Sysmac的入門機型

高功能運動控制
內建EtherCAT通訊埠,使用高功能運動控制實現裝置的高速、高精度化
• 最多可進行4軸運動控制。透過電子凸輪功能及補間功能,實現裝置的高速、高精度。
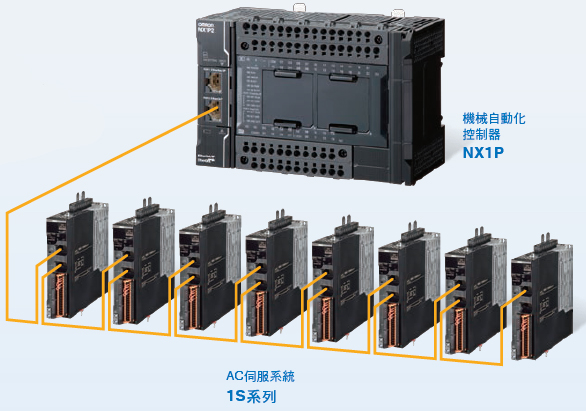
• 可以使用EtherCAT簡單接線包含單軸位置控制在內,最多8軸之伺服系統。
補間功能
• 需要高精度的加工以及最短路線高速定位的運送等作業,可以使用直線補間及圓弧補間控制軌跡
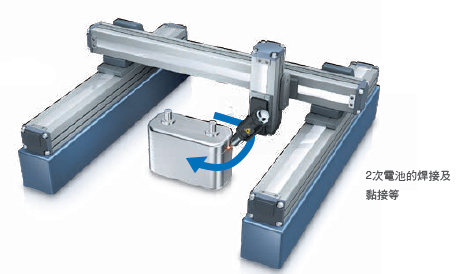
電子凸輪功能
• 搭載電子凸輪功能。可以使間歇動作的裝置連續動作,實現裝置的高速化
• 將凸輪運動電子化,即可使用程式輕鬆變更運動時序,亦可進行機械凸輪難以對應的多品種生產


補正資料傳輸的時間延遲差,同步伺服馬達之間的控制。
各軸同步,實現高精度的定位。
• EtherCAT可以使用1條通訊線連接NX1P及伺服驅動器,減少接線工時
AC伺服系統 1S系列
• 無電池可以節省維修或空間
• 23位元ABS編碼器標準搭載不需要原點復歸
• 進化的迴圈控制提高追蹤性並減少調整時間
• 安全功能搭載(STO)
實現重視現場的IoT網路
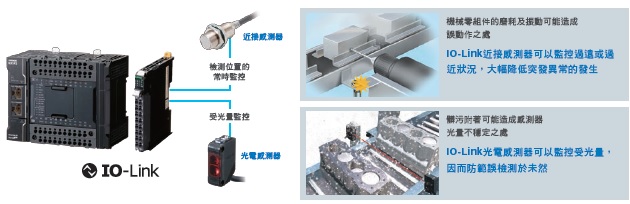
不僅是控制器、運動控制,亦藉著IO-Link實現感測器等級的製造現場資訊化
• 使用EtherCAT將輸入機器、輸出機器、安全控制器及影像系統連接在同一線路,監控並掌握各機器的狀態。
• EtherNet/IP可以實現與上層PC的通訊、NJ/NX系列、CJ系列與控制器之間的資料連結。
• EtherNet/IP可以實現與上層PC的通訊、NJ/NX系列、CJ系列與控制器之間的資料連結。
• 使用MQTT通訊,您可以輕鬆連接到雲端並安全從製造現場收集數據。

使用IO-Link預防維護
小規模導入預防維護。能夠以小模規開始裝置狀態的可視化,如新規小型裝置及既有設備的加裝。
產品線
機械自動化控制器 NX系列
NX1P2型 CPU模組

NX系列
NX1P主體可以安裝至8台。

Sysmac Studio 自動化軟體

Sysmac Studio為了以NJ/NX系列CPU模組為首的機械自動化控制器的編程、除錯、維修作業,而提供整合開發環境的軟體。
• 將運動控制、邏輯、安全、驅動、影像感測器以及HMI的支援功能整合至單一軟體
• 對應變數的指令語支援階梯圖語言、ST語言及功能區塊編程(依據IEC 61131-3)
• 搭載凸輪編輯器,可以簡單設定複雜的運動控制
• 實現整合邏輯及動作的3D模擬及除錯
• 可以專案及POU各別設定32位數高度安全的密碼功能
Sysmac 為OMRON 公司製造之FA 產品於日本及其他國家之商標或註冊商標。
Windows 為美國微軟公司於美國及其他國家之註冊商標或商標。
EtherCAT® 為德國Beckhoff Automation GmbH 取得許可證之專利技術,亦為註冊商標。
EtherNet/IP™為ODVA 之商標。
本手冊上所刊載之公司名稱及產品名稱為各家公司之註冊商標或商標。
本型錄使用的產品照片及圖片包含示意圖,可能與實物不同。
使用之螢幕擷圖已取得微軟同意。
更新日期 2026年2月9日
© Copyright OMRON Corporation 1996 - 2023. All Rights Reserved.